
| 2000 | 2001 | 2002 | 2003 | 2004 | 2005 | 2007 | 2011 |
|---|
2000 (Version 1)
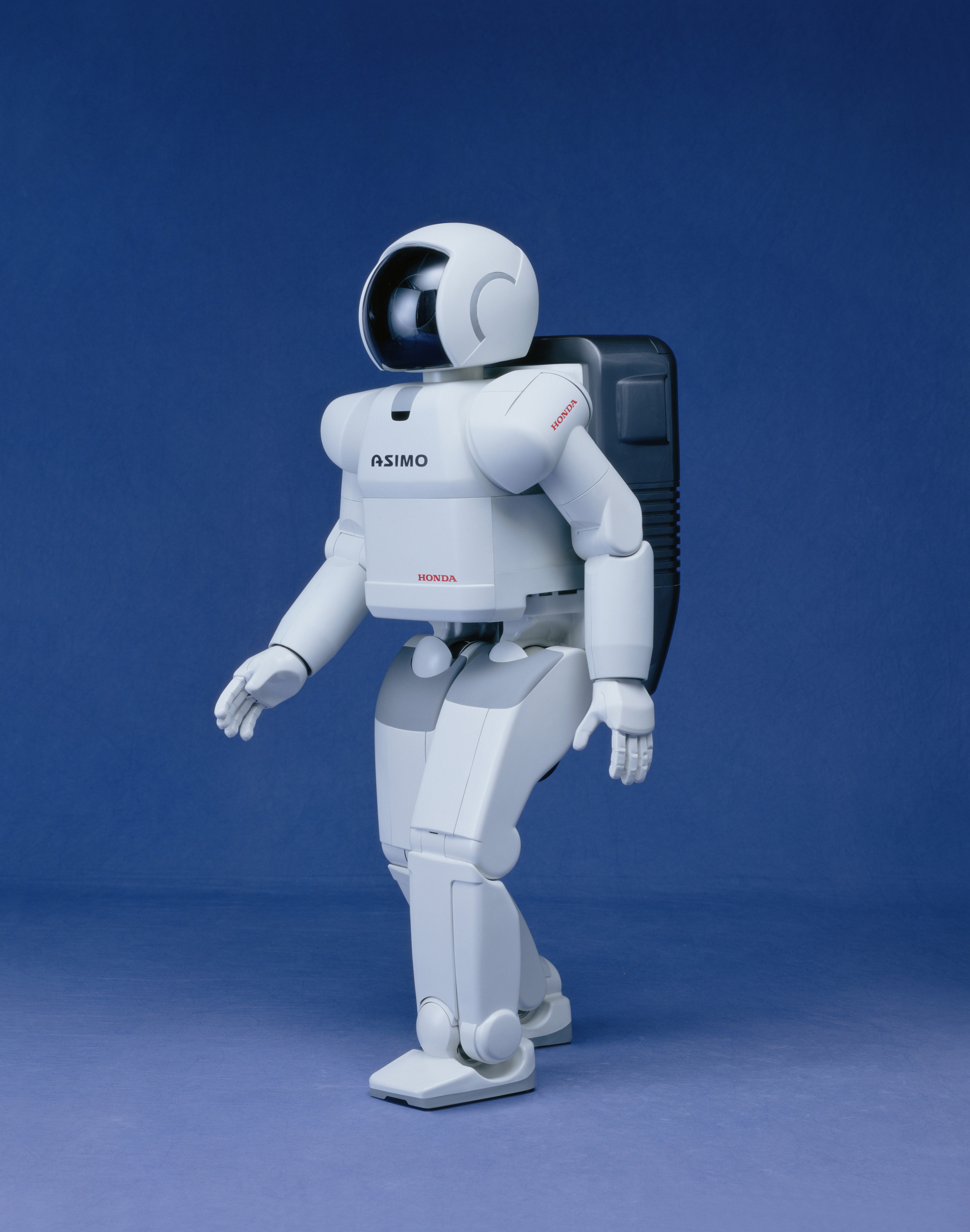
On November 20th, 2000, Honda announced ASIMO, a humanoid robot aimed to be a helper to humans in every day life. This vision inspires its design, being just the right size to operate in a home or office environment and range of motion to reach doorknobs and light switches. ASIMO was developed at Honda's Research & Development Wako Fundamental Technical Research Center in Japan.
The name ASIMO is actually an acronym which stands for "Advanced Step in Innovative MObility".[1] Contrary to popular belief, ASIMO was not named after Isaac Asimov.[12] The researchers at Honda were unaware of Asimov at the time of naming, and said that if they had known, they would have most likely chosen a different name.


ROBODEX 2000, three days after ASIMO's unveiling, was it's first general public appearance. On December 21st, it would be announced that Honda would start renting out ASIMO units in fall of 2001 for $150,000 a month.[2]
Hardware
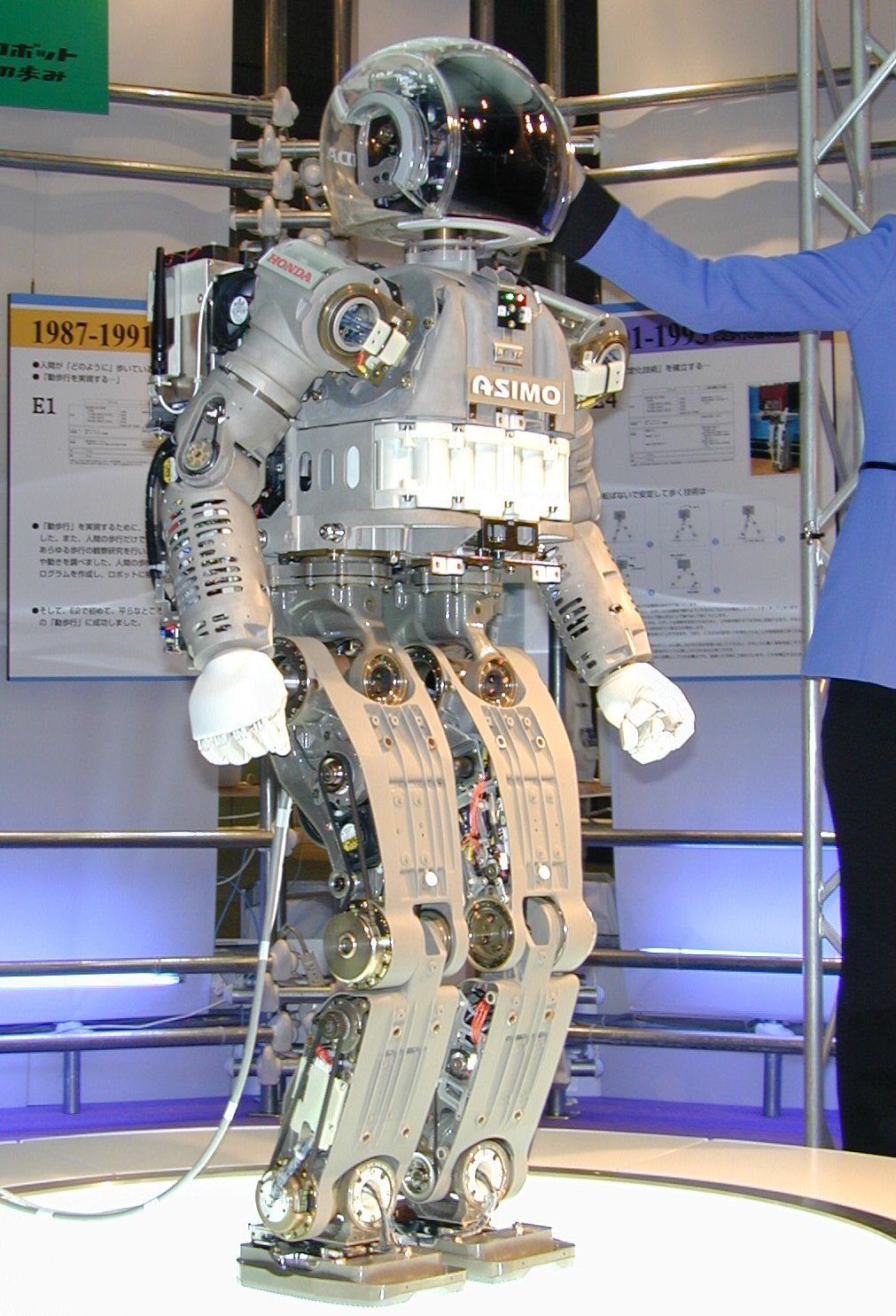
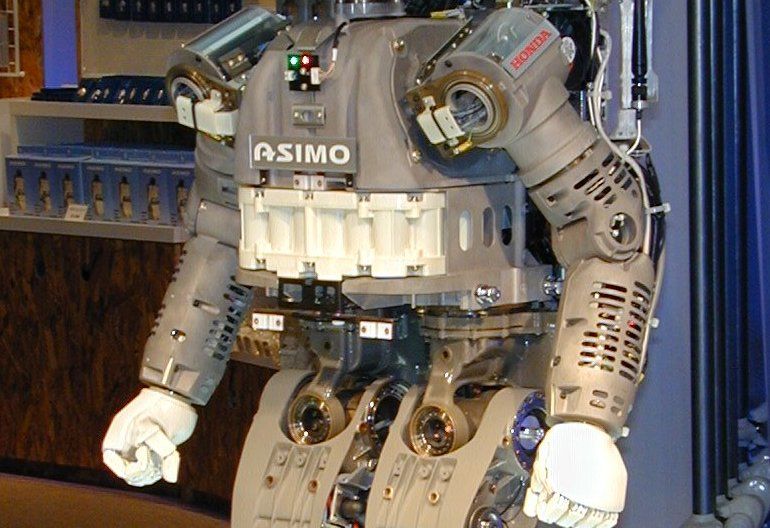
On November 16th, 2001 at Robo Festa Kanagawa 2001, we got a good look inside of what makes up ASIMO's internal structure.[3] Even though the ASIMO 2001 had been announced by this point, the one being displayed is the ASIMO 2000 as it still has the cable conduits running to the back of the legs, which are not present on ASIMO 2001.
ASIMO stands 120 cm tall and weighs 43 kg. The skeletal structure is made from a light weight, high strength magnesium alloy, with the exterior shell made up of plastic resin. It has 26 degrees of freedom (DoF). The shoulder joint is attached at a 20 degree angle, making it possible to raise it's arms higher than it's shoulders.
At the torso, we can see the 38.4V 10 Ah Ni-MH battery in white plastic, its location giving it a good center of gravity. Average run time was approximately 30 minutes, with charging taking 4 hours. However, with it's battery being located in it's lower torso, it could quickly be replaced with a fully charged one. The battery made up 18% of the total weight, weighing in at 7.7 kg and is the single heaviest component. A 100V AC/15A outlet is necessary to charge the cells or to run tethered.
Each hand having 1 DoF, the fingers are wire-driven with a gripping force was 0.5 kg. When trying to grip an object, the index finger starts to close. Once it has made contact with the object, the next finger closes, and so on.
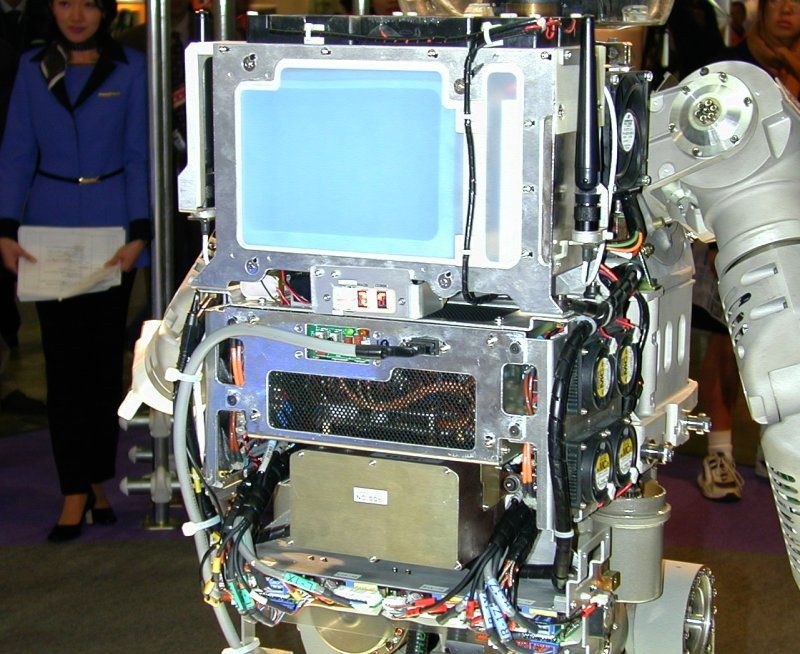
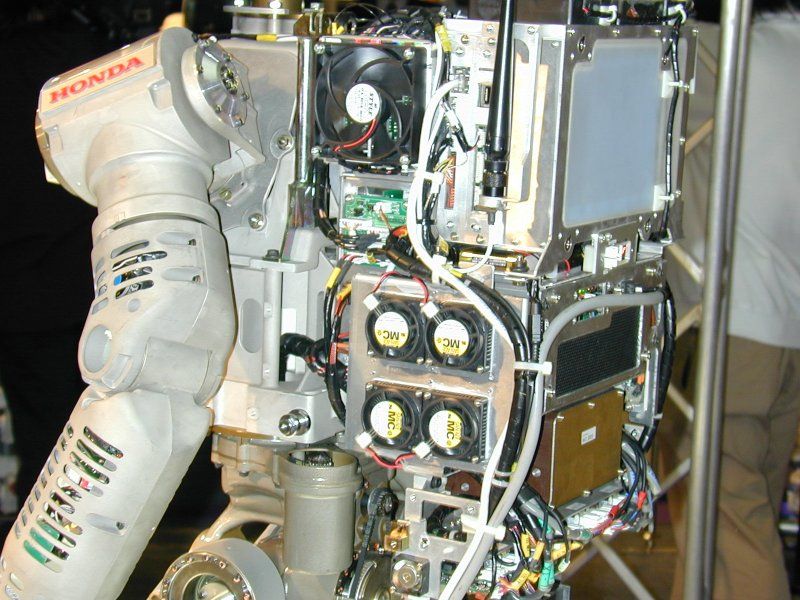
Now, located in the backpack is where everything really happens. At the top is where the main computer lives. There are is an undisclosed number of CPUs onboard. Wireless antennas can be seen on both sides of its enclosure. Below are power supplies with four Sanyo Denki San Ace MC cooling fans placed on each side of the enclosure.
Another thing you can see from this angle, directly below where the battery is located is how the hip's yaw axis is driven. The motor is not attached to the torso, but instead what looks like a canister attached at the hip structure, meaning that each leg is self contained (functionality wise), and probably makes it easier for maintenance.
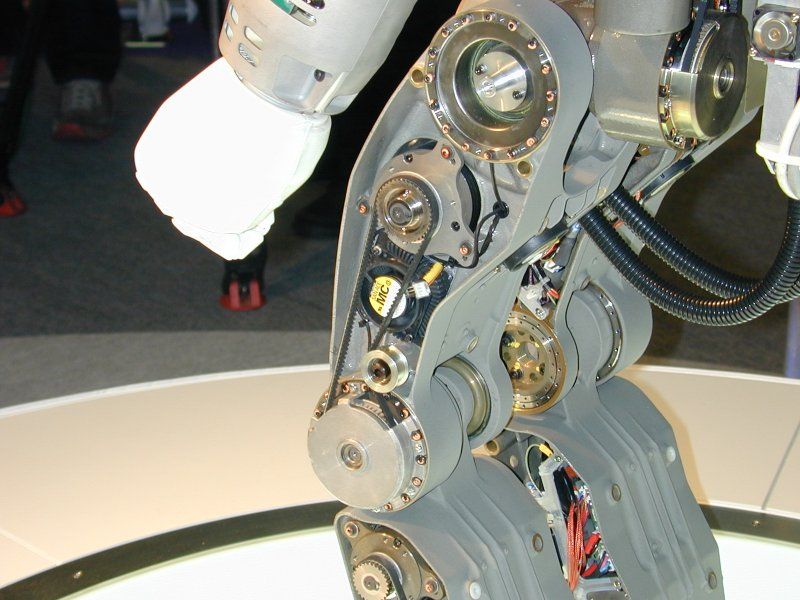
As you can see, power is transmitted to the knee through a belt, with the motor located in its upper thigh. You can also see the same mechanism for the ankle's pitch axis and for the hip's roll axis. The hip's pitch axis is most likely directly driven, with its location being in the center of that hip joint.
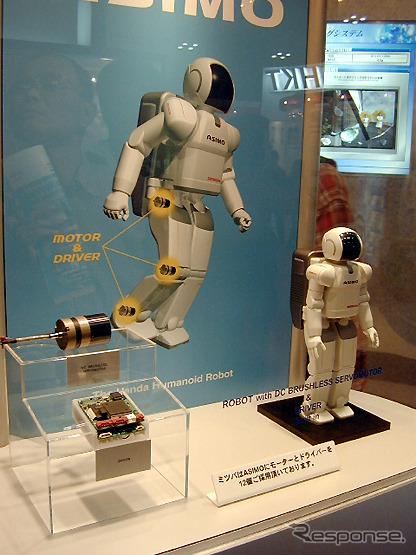
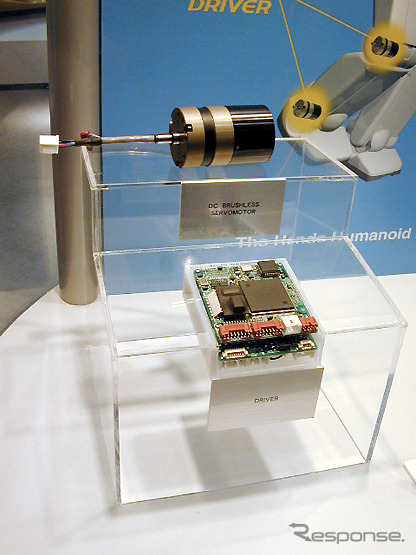
Each actuator consisted of a servo motor, harmonic reducer, and a drive unit. 12 of the motors and drivers are from Mitsuba, making up over 40% of the actuators used throughout ASIMO's body.[4] Mitsuba developed custom DC brushless motors for use in the lower half of ASIMO, with key requirements being ease of control and responsiveness.
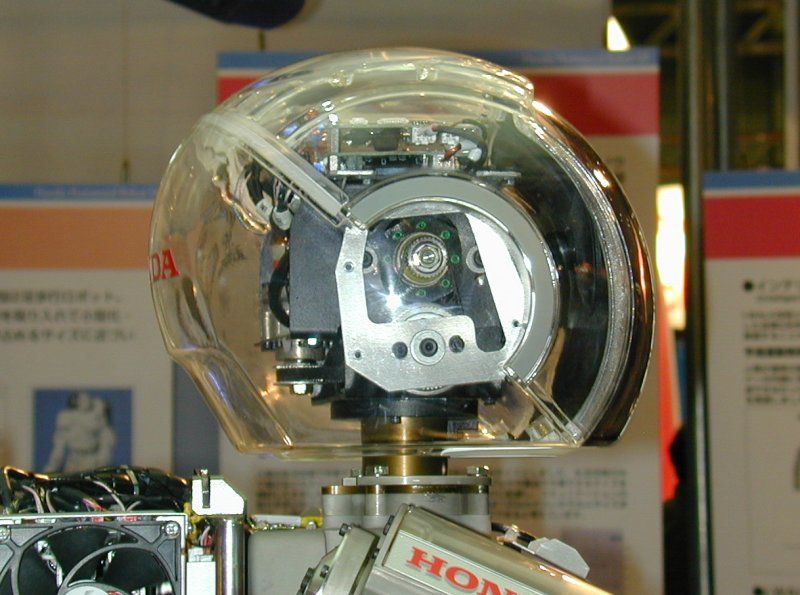
Taking a look at its head, we can see components relating to its mechanisms for the head motion. Also, we can see where its stereo CCD cameras are placed.
In this video, there are two short clips of ASIMO very disassembled. The first is of ASIMO suspended without a battery, and its head is down to only motors, boards, and cameras. Second is of ASIMO's face plate being installed on its bare head. If you look to where its torso is, it looks to be a sub-frame that usually lies below the magnesium alloy "exoskeleton". You can see some stitch welds on the frame, holding everything in place.
Mobility
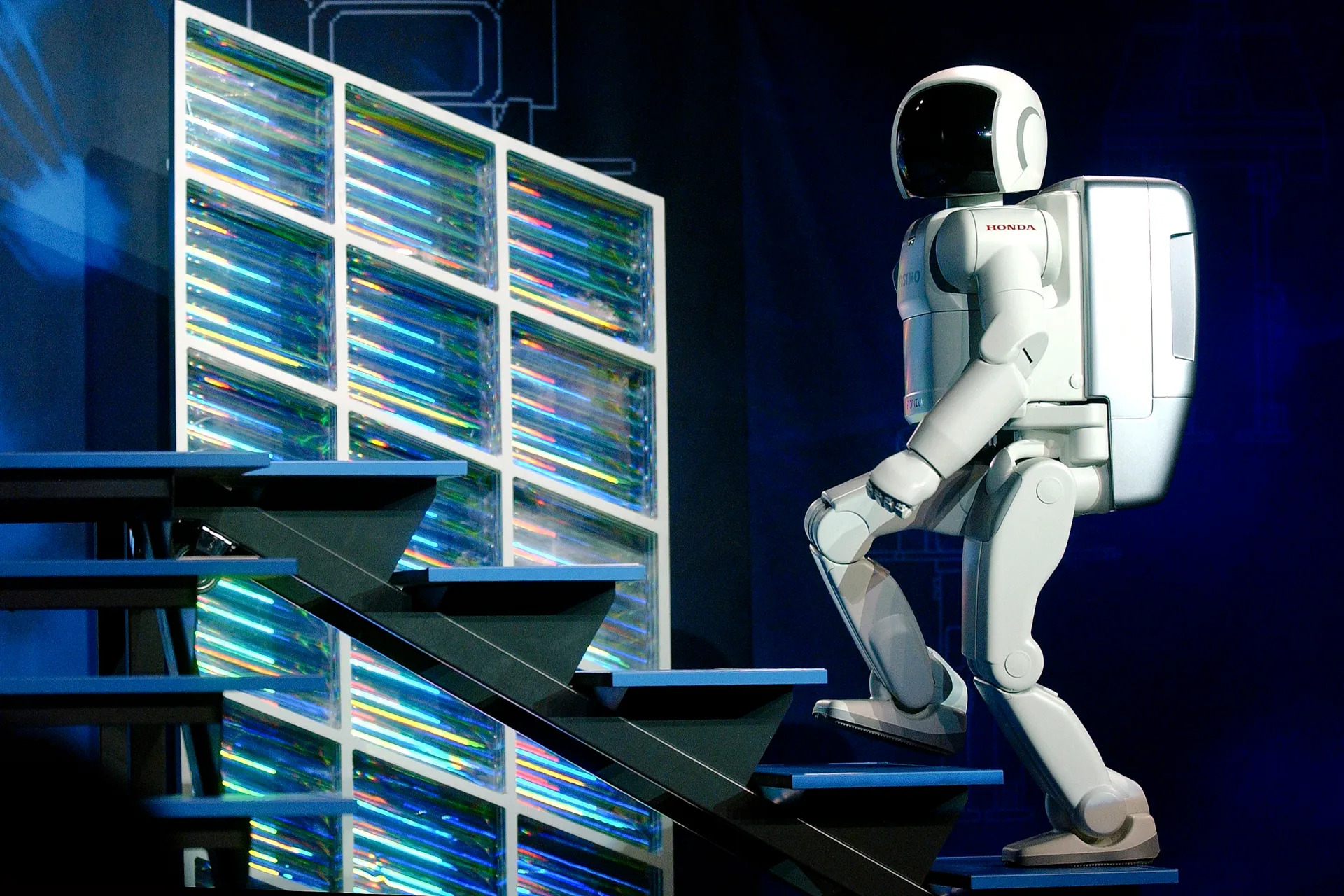
i-WALK (Intelligent Real-Time Flexible Walking). The technology behind ASIMO's (at the time never before seen) capabilities, enables smooth and continuous walking and changes in direction. Previously when a robot would approach a sharp corner while walking, they would walk up past the corner, stop, turn, then continue walking. This unnatural procedure is because they could not shift their center of gravity in towards the corner to walk in a continuous, curved motion. Using 6-axis force sensors in the feet and gyro/acceleration sensors in the torso, ASIMO is able to predict where it's center of gravity will be while walking, adjusting its current center of gravity to compensate in real-time. Enabling walking speeds of up to 1.6 km/h.
It's movement capabilities include walking, crab walking, diagonal walking, turning in place, and cornering. However, these movements were limited to 2D terrain, with the exception of specially designed stairs that were built with millimeter accuracy in mind. 3D terrain adaptability had not been implemented.
Controls
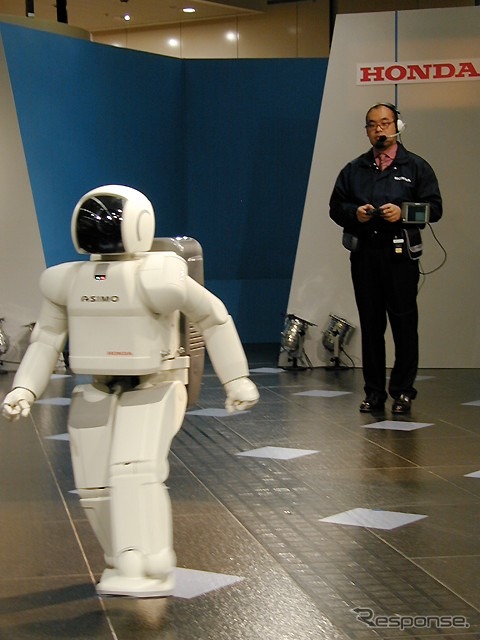
This prototype mobile controller was seen being used at ASIMO's announcement demonstration.[5] It consists of a Xybernaut MA-IV mobile computer running Windows attached at the waist and a Logitech Wingman Rumblepad controller.



Variations
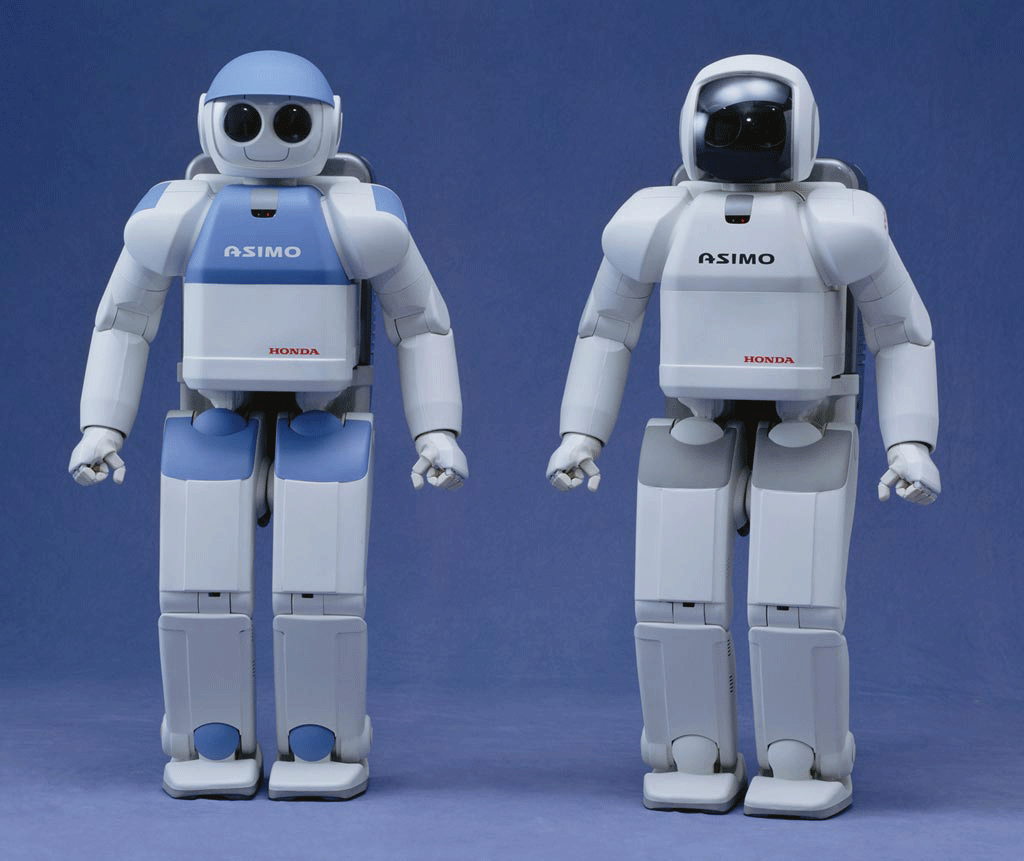
The color variations include gray, red, green, blue, and gold. There is also a unique one that has an entirely different head, featuring large eyes and a smiling mouth that are usually hidden behind it's visor. This new design was shown off during the rentals announcement.[6]

Honda International Technical School (HITS), with their robot "Firstep", a modified ASIMO 2000 prototype, competing at RoboCup Japan Open 2003 Niigata.[7] They would then attend RoboCup World Tournament 2003 Italy, and come in first, winning the Louis Vuitton Cup.[8][9]
This was the first time a team outside of Honda R&D were allowed to work on the ASIMO platform. It was designed to kick a soccer ball by hitting it through it's walking gait.


Firstep's height is 125 cm and weights 50 kg.[10] Replacing ASIMO's head was a custom head with a screen for a face, displaying animated expressions like the ones above.[11] There was also a custom enclosure for the backpack with upgraded wireless communication antennas, but was reverted back to the original for Italy.
References
- Honda unveils new 120cm/43kg humanoid robot "ASIMO"
- Honda launches rental business for bipedal robot "ASIMO"
- First public reveal!! This is the inside of "ASIMO"!! --Robo Festa Kanagawa 2001
- [Tokyo Show 2001 Update] Honda's ASIMO Robot: Heart? Muscles? Joints?
- With the arrival of Honda's even more human-like robot "ASIMO," the future is just around the corner!
- Announcement of voice recognition function and rental business
- "RoboCup Japan Open 2003 Niigata" held -- the first ever human vs. robot penalty shootout!
- RoboCup 2003 World Championship (Italy) Participation Report
- Won the Louis Vuitton Cup for winning the overall humanoid class at the 2003 ROBOCUP.
- RoboCup Japan Open 2003 Observation Report
- "World Championships in Italy"
- Next generation: as Honda's Asimo robot grows up, we quiz engineer Satoshi Shigemi about its future