
| 2000 | 2001 | 2002 | 2003 | 2004 | 2005 | 2007 | 2011 |
|---|
2007 (Updated Version 2)

On December 11th, 2007, an enhancement to ASIMO 2005 was announced, focusing on collaboration between ASIMOs. During the announcement, Honda told the media that they planned on placing two ASIMO units in the lobby of their Aoyama, Tokyo headquarters to perform customer service tasks, starting the next day, December 12th.[1]
Software
The back bone of this revision is collaboration. And to facilitate this, multiple ASIMO units can be connected to eachother via a network server. Depending where an ASIMO is and where a job needs to be performed, a time optimized schedule is created and different tasks are delegated to different ASIMO units.
If ASIMO predicts a person's walking path to intersect it's own, it will move out of the person's path and pass by walking around them. This is also possible in the case where the walking path of two ASIMOs would interect. If there isn't enough space to pass, ASIMO will step back and give the right of way to the person.
Ancillary Equipent


ASIMO could now automatically locate and dock to a charger when its batteries were low. Since all ASIMOs are connected over the network, if one is in the middle of a task and gets low on charge, another one can assume the role of the other and complete the task, ensuring continuous service without interruption.
It uses markers on the ground to align itself with the charger withing a few millimeters. The guide pin on the connector is tapered as well, so small errors can be tolerated.[2]
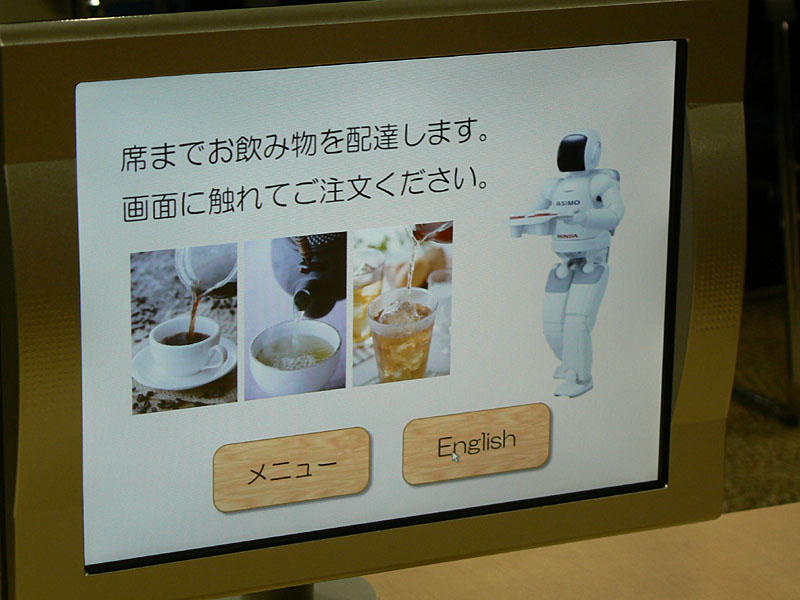

Touch screen terminal located at the end of each table for ordering drinks.


The tray and table marker used for drink delivery.
Appearances
April 23, 2008 - ASIMO conducts the Detroit Symphony Orchestra
References
- Honda Develops Intelligence Technologies Enabling Multiple ASIMO Robots to Work Together in Coordination
- Experience ASIMO's Guidance and Delivery Service ~ ASIMO autonomously walks around in ordinary spaces
- ASIMO takes a step into the real world: Demonstration of cooperative movements by multiple units